
- About Us
- Information
-

The Author ensures that the research has been conducted responsibly and ethically with adherence to all relevant regulations. read more..
- For Authors
- For Reviewer
- Manuscript Guidelines
- Membership
- Publication Ethics
-
- Journals
- Reprints
- e-Books
- Videos
- Policies
- Contact Us
 COVID-19
COVID-19
- Submissions



Full Text
Peer Review Journal of Solar & Photoenergy Systems
Wind Load on a Solar Photovoltaic Station in the Conditions of the Karakum Desert
AM Penjiyev*
Turkmen State Institute of Architecture and Civil Engineering, Turkmenistan
*Corresponding author: AM Penjiyev, Turkmen State Institute of Architecture and Civil Engineering, Turkmenistan
Submission: August 21, 2023;Published: November 07, 2023
Volume2 Issue4 November 07, 2023
Abstract
The article presents the results of studies of the influence of wind load on the dynamic characteristics of Solar Power Station (SPS) tracking systems for the Sun with two-coordinate electromechanical actuators in the conditions of the Karakum desert. The load on the actuator under the action of the wind showed that when using a stepper motor of the brand (ShD-5D), which has a nominal moment of 0.4 N·m, in the SPS-0.5 installation at a wind speed of 20m/s, the moment from the action of the wind load in the system of movement along the azimuth exceeds the maximum moment of the SD by 1.2 times, and at a speed of 25m/s- by 1.9 times. Regression equations are compiled and the correlation coefficient is determined. The determination coefficient confirmed that the impact of wind load on the dynamic characteristics of electromechanical systems in terms of angle and azimuth is 86.04%, and the remaining 13.96% is the influence of the engine drive shaft at the moment of inertia of the frame with SPS and other unaccounted for factors.
Keywords:Solar power plant; Sun tracking; Wind load; Wind speed; Stepper motor; Karakum Desert; Turkmenistan
Introduction
The growing demand for energy resources, the increase in their cost and the increasing negative impact on ecosystems require the intensification of the use of cleaner types of energy, in particular solar. In Turkmenistan, the resources of this energy are inexhaustible. A promising area for the use of solar energy is the Karakum desert, which occupies 80% of the country’s area. The development of these territories in the aspect of solving the problem of desertification is impossible without their energy and water supply. However, the laying of 1km of power transmission lines in the Karakum desert, where the population density is very low, costs the state 16-25 thousand US dollars and therefore is not economically profitable [1-6]. In this regard, it is necessary to find new ways to solve this problem. One of them is the use of Solar Power Plants (SPS) with highly efficient Solar Modules (SM) based on the use of systems for continuous automatic tracking of the Sun [2,5,6]. The experience of foreign countries in this area, in particular, the United States, testifies to their effectiveness. Thus, the cost of electricity generated by a SPP with a capacity of 1MW with a two-coordinate tracking system is 0.06-0.23 US dollars/1kW·h [2,5,6].
When compiling design estimates for the operation of solar power plants, it is necessary
to solve the problem of maximum power generation of photo modules based on the use of
an automated process control system. This requires the development of Automated Control
Systems (ACS) for SM tracking the Sun and an extreme battery charge/discharge controller.
Solving the problem of ACS for tracking the Sun should provide:
A. The influence of natural and climatic characteristics on SPS and wind load on the dynamic
characteristics of electromechanical tracking systems.
B. Maximum increase in energy production per unit area of solar modules.
C. Minimum power consumption of mechanical motors and mechanisms.
D. The optimal angle of inclination of frames with SM solar
energy inflow into the solar power plant.
The purpose of the study is to determine ways to improve the energy efficiency of automated Solar Power Plants (ASPS), determine the wind load on the dynamic characteristics of electromechanical tracking systems and reduce the cost of electricity for tracking and control. The task of the study-ASPS is an automated process control system of the lower and middle levels. Its task is to create a highly efficient (from the point of view of the energy efficiency of ASPS) control of the process of the movement of SPS behind the Sun. At the same time, the features of the control object and the impact of external factors should be taken into account. To ensure maximum energy efficiency while minimizing energy costs for the tracking process and the implementation of the transfer of control of the ASPS system to the operator in emergency and commissioning modes. Research methodology to improve the efficiency of using a solar photovoltaic station in the Karakum desert, taking into account the natural and climatic characteristics of the distribution of the wind flow in the region and the effect of wind load on the dynamic characteristics of the electromechanical tracking systems of the solar power plant.
Wind Regime of Turkmenistan
It is known that northern winds prevail in the Central and Eastern Karakum (25-35%), in the eastern part of the Kopetdag foothills-northwestern (20-30%), in the west of the foothillseastern (35-50%) [3,4,6]. The annual course of wind speed in the territory of Turkmenistan depends on the conditions of the terrain. For example, on the surface plains, the indicator is 3.2-4.2m/s, in oases - no more than 3.1m/s [3,4]. In spring and summer, when the soil surface warms up, the turbulent exchange between the surface and upper layers of air intensifies, which causes an increase in the average annual wind speed. However, most often, on average per month, year by year, it changes by 0.5-1.0 (in summer) and 1-2 (in winter) m/s. In this case, the systematic error in the calculation of the frequency of wind directions is 0.2-0.8% [3,4]. Important components of the wind energy cadastre are the temporal characteristics of the wind speed, which in the northern regions of Turkmenistan range from 3.8 to 4.8m/s, the graphic is shown in Figure 1.
Figure 1:Average wind speed in the regions of Turkmenistan. Dashoguz Ekeje Garabogazgol Chagyl

Calculation of the Moment of Inertia of the Movement Mechanisms and the Effect of Wind Load on the Solar Power Plant
To study the dynamic characteristics of the electromechanical tracking system, it is necessary to know the value of the moment of inertia of the frame with SM reduced to the motor shaft. In the developed design of the SPS, the moment of inertia of the mechanism changes, namely, a change in the position of the frame with the SM in elevation leads to a change in the moment of inertia in azimuth. Therefore, it is required to calculate the moment of inertia of the mechanism for SPS-0.5 and SPS-1, in which two and four SMs of the KSM-160 type are installed. The moment of inertia of the mechanism in terms of elevation is determined by the formula [2,5,6-12]:

where m is the mass of the frame with CM (53kg); h is its height (1.61m); d - width (1. m).
The calculation of the moment of inertia for two SM is:

The calculation of technical characteristics with four CMs for SPS-1 is: weight - 102kg, width - 3.2m, height - 1.607 m. In this case, the moment of inertia of the load is equal to:

Calculations of the shaft moment of inertia of the motor is reduced by a value in the square of the gear ratio i (i = 900 in SPS - 0.5 and SPS-1 depending on the elevation) and is for both SPS, respectively, is:
where i is the gear ratio of the gearbox.
For the study, a stepper motor of the ShD-5D brand was used, according to the passport data, the moment of inertia is Jdv =4.10−6kg m2 . The moment of inertia of the mechanism reduced to the motor shaft is 7-33 times higher than that of the motor [12- 16].
Calculations of two mechanisms for changing the moment of inertia for SPS -0.5 and SPS-1 in azimuth at the extreme positions of the frame along the corner of the desert area are shown in Figure 2.
Figure 2:Scheme of the mechanical structures of SPS-0.5 (a) and SPS-1 (b).

The mechanical design of the solar power plant consists of: a fixed and movable base driven by an electromechanical system of azimuth rotation; two racks and a frame with two SM (a) and four SM (b) fixed on it, driven by an electromechanical tracking system at different angles. We calculated the moment of inertia for the azimuthal tracking actuator at two positions of the SM frame (Figure 3 a & b):
Figure 3:Scheme of the arrangement of the frame structure with SM at an angle of 0˚ (a) and 90˚ (b) degrees.

a - under the corner of the frame with SM is in a vertical position,
that is, at an angle of 0˚ degrees;
b - under the corner of the frame with the SM is in a horizontal
position at an angle of 90˚ degrees.
In the first case, you can calculate the moment of inertia [12- 16] as for a plate with a width d and a mass m using the following formula:

In the second case, the moment of inertia can be calculated as for a solid cuboid with width d, height h, depth w and mass m using formula (1). Substituting formulas (6) into (1), it follows that the moment of inertia when the angle changes from 0˚ to 90˚ degrees changes by 2 times (J3/J4), provided that the frame is a square (in this case, for SPS-0.5 installations ). In a real system, the change in the moment of inertia occurs by a factor of 1.93 (when the position changes in elevation from 0 to 70 degrees). To study the dynamic characteristics of the SPS electromechanical tracking system, it is necessary to calculate the value of the additional moment from the wind load acting on the frame with the SM. The moment from the wind load can be calculated using the following formula [2,5,7,9- 12]:

where S is the SM area; L is the height of the frame (station); K = 0.4 - coefficient for the terrain; W = 0.61V2; V is the wind speed.
Calculations for two cases of SPS of the moment from wind load are given in table 1. In the first case, the SPS -0.5 calculations are located by a reducer in azimuth i=250o, at an elevation angle i=90˚, an installation height of 2m and an area of solar modules of 2.5m2. SPS-0.5 conditional is located in the northern part of the Karakum desert.
Discussion of Results
When using the ShD-5D motor, which has a maximum torque of 0.4 N·m (at f = 2000Hz and Jn = 8·10-6), in the SPS installation-0.5 at a wind speed of 20m/s, the moment from the action of the wind load in the azimuth movement system will exceed the maximum moment of the stepper motor by 1.2 times, and at a speed of 25m/s - by 1.9 times. Table 1 also shows the values of the additional moment from the wind load for the installation of SPS-1 (the area with four CMs of the KSM-190 type is 5.08m2). Figure 4 shows the moment of influence of the wind load on the motor shaft depending on the wind speed SPS - 0.5 and SPS-1. In the practice of research work, it becomes necessary to approximate the diagram of a mathematical equation. The linear mathematical expression of the correlation dependence is called the regression equation; x is the magnitude of the change in wind speed, m/s. The resulting regression equation, the moment of influence of the wind load on the motor shaft, depending on the wind speed for SPS - 0.5 and SPS - 1 has the form:

where R2 is the correlation coefficient. Using the coefficient of determination d=R2 100% in equations 8,9 determined the close relationship between the wind speed and the moment of the wind load, it is equal to 86.7%. Therefore, 86.7% is influenced by the wind load on the dynamic characteristics of electromechanical systems, and the remaining 13.3% is the influence of other unaccounted factors.
Table 1:Influence of wind load on the drive shaft of stepper motor SPS-0.5 and SPS -1.

Figure 4:Influence of wind load on the motor shaft depending on the wind speed SPS - 0.5 and SPS – 1: Moment of wind load SPS-0.5, N·m; Moment of wind load SPS-1, N·m.

Figure 5 shows graphs of the reduced load torque to the motor shaft in elevation and azimuth for two SPS -0.5 and SPS-1 under the action of wind load in the desert zone of the Karakum. When using the motor SD-5D, which has a maximum torque of 0.4 N·m (at f = 2000Hz and jн = 8·10-6), in the SPS installation -0.5 at a wind speed of 20m/s, the moment from the action of the wind load in the azimuth movement system will exceed the maximum moment of the stepper motor by 1.2 times, and at a speed of 25m/s - by 1.9 times. Table 1 shows the values of the additional moment from the wind load for the SPS-1 installation (the area with four KSM-190 type CMs is 5.08m2).
Figure 5:Influence of wind load on the motor shaft SPS - 0.5, SPS - 1 depending on the elevation, azimuth and wind speed: Reduced torque to the motor shaft in elevation SPS-0.5, N·m; The reduced moment to the motor shaft in azimuth of the place SPS-0.5, N·m; Reduced torque to the motor shaft in elevation SPS-1, N·m; The reduced moment to the motor shaft in azimuth of the place SPS-1, N·m.

When using the ShD-5D engine in the SPS-1 installation at a wind speed of 15m/s, the moment from the action of the wind load in the azimuth movement system exceeds the maximum moment of the ShD-5D engine by 1.8 times, at a wind speed of 20m/s - in 2.4 times, and in the system of movement in elevation at a speed of 25m/s, the moment from the action of the wind load exceeds the maximum moment of the stepper motor. In the recommendations for the use of step motors [5,7,8], in order to avoid failure in the step motor, the load torque should not be higher than 0.3-0.5 of the maximum torque. The resulting regression equation for the effect of wind load to the reduced moment to the motor shaft in elevation, azimuth to the motor shaft depending on the wind speed for SPS -0.5 and SPS -1 has the form:
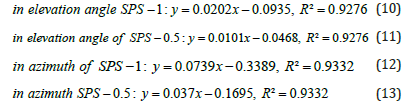
The coefficient of determination for equations 10.11 determined the close relationship between the wind speed and the reduced moment to the engine shaft in elevation, it is equal to 86.04%. Consequently, 86.04% is influenced by the wind load on the dynamic response of electromechanical systems in terms of angle, and the remaining 13.96% is the influence of other unaccounted factors. The coefficient of determination for equations 12.13 determined the close relationship between the wind speed and the reduced moment to the engine shaft in azimuth, it is equal to 87.08%. Consequently, 87.08% is affected by the wind load on the dynamic characteristics of electromechanical systems in azimuth, and the remaining 12.92% is the influence of other unaccounted factors.
Conclusion
A. The calculation of the change in the moment of inertia of the
azimuthal tracking mechanism when the position of the frame
with the SM changes in elevation showed that the moment of
inertia of the movement mechanism in the limit changes by
half when the position of the frame in elevation changes by 90
degrees.
B. The calculation of the additional load torque on the actuator
under the influence of wind showed that when using the ShD-
5D engine, which has a rated torque of 0.4N·m, in the SES-0.5
installation at a wind speed of 20m/s, the torque from the
action natural wind load in the azimuth movement system
exceeds the maximum moment of the motor by 1.2 times, and
at a speed of 25m/s - by 1.9 times.
C. Regression equations were compiled and correlation
and determination coefficients were determined, which
characterize the relationship of wind speed to the reduced
torque of the engine shaft in elevation and azimuth. The
influence of wind load on the dynamic characteristics of
electromechanical systems in angle and azimuth is 86.04%,
and the remaining 13.96% is the influence of the motor drive
shaft at the moment of inertia of the frame with Solar Modules
(SM) and other unaccounted factors.
References
- Berdymukhamedov GM (2010) State regulation of socio-economic development of Turkmenistan, Turkmen State Publishing Service, Ashgabat, Turkmenistan, p. 498.
- Berdymukhamedov GM (2018) Turkmenistan on the way to achieving the sustainable development goals, Turkmen State Publishing Service, Ashgabat, Turkmenistan, p. 468.
- Strebkov DS, Penjiyev AM, Mamedsakhatov BD (2012) Development of solar energy in Turkmenistan, GNU VIESH, Moscow, Russia, p. 498.
- Penjiyev AM (2012) Climate change and the possibility of reducing anthropogenic pressures, LAP Lambert Academic Publishing, Germany, p. 164.
- Penjiyev AM (2014) Ecological problems of the development of deserts, LAP Lambert Academic Publishing, Germany, p. 226.
- Penjiyev AM (2023) Eco-energy resources of renewable energy sources: Monograph, p. 400.
- Penjiyev AM, Penjiyeva DA (2015) Resources and efficiency of geothermal water use: Monograph, LAP Lambert Academic Publishing, Germany, p. 224.
- Penjiyev AM (2017) Basics of GIS in the development of renewable energy: monograph, LAP Lambert Academic Publishing, Germany, p. 308.
- Drive for solar panels.
- Electromechanotronics: Intelligent single-phase systems mass-purpose electric drive.
- Solar power tracking.
- Chai kk, Tay KM, Abdullah MO (2011) Development of a solar photovoltaic system equipped with a sun tracker system: A case study in Kuching, Sarawak. IJRRAS 7(4): 373-379.
- Lebedev ED, Neimark VE, Pistrak MYa, Slezhanovsky OV (1970) Control of DC valve electric drives, p. 200.
- Arzhanov KV (2014) Two-coordinate solar guidance system batteries on the sun. News of Tomsk Polytechnic University, Tomsk, Russia, pp. 139-146.
- Belenky YM, Zelenkov GS, Meekerov AG (1987) Experience in the development and application of contactless torque drives, Publishing House LDNTP, Leningrad, Russia, p. 29.
- Shurygin, Yu A, Shinyakov KV, Arzhanov VV (2013) Minimization of energy consumption by electric drives in a photovoltaic power plant. News of Tomsk Polytechnic University, Tomsk, Russia, pp. 146-150.
© 2023 AM Penjiyev. This is an open access article distributed under the terms of the Creative Commons Attribution License , which permits unrestricted use, distribution, and build upon your work non-commercially.
Editor In Chief







.jpg)

























Signup for Newsletter

Quick Links
 Editorial Board Registrations
Editorial Board Registrations Submit your Article
Submit your Article Refer a Friend
Refer a Friend Advertise With Us
Advertise With UsOur Recent Edition

.jpg)



Top Editors




.jpg)

















.bmp)
.jpg)
.png)
.jpg)













.jpg)






.png)

.png)




.png)




Financial Support

Sponsors

Latest e-Books

Latest Video

 a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in
a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in