
- About Us
- Information
-

The Author ensures that the research has been conducted responsibly and ethically with adherence to all relevant regulations. read more..
- For Authors
- For Reviewer
- Manuscript Guidelines
- Membership
- Publication Ethics
-
- Journals
- Reprints
- e-Books
- Videos
- Policies
- Contact Us
 COVID-19
COVID-19
- Submissions



Full Text
Peer Review Journal of Solar & Photoenergy Systems
Dimension and Symmetry Inspection Algorithm of Closed Keyseat Based on Grating Principle
Lizhi Gu1,2, Jinling Song3*, Shanping Gao1, Ehui Huang1 and Bingzhang Lin1
1Key Laboratory of Virtual Manufacturing Technology of Fujian Universities, Quanzhou University of Information Engineering, China
2College of Mechanical Engineering and Automation, Huaqiao University, China
3Quanzhou Normal University, China
*Corresponding author: Jinling Song, Quanzhou Normal University, China
Submission: February 07, 2023;Published: May 05, 2023
Volume2 Issue3 May , 2023
Abstract
The closed keyseat on the shaft is an important surface of the shaft, which requires high precision keyseat depth and symmetry. But the closed keyseat on shaft is usually finished by V-block positioning milling on general purpose milling machine or NC machine tool with difficult to meet high precision requirements, especially the high precision inspection. Based on the analysis of the general inspection methods of keyseat depth and symmetry, this paper proposes and uses the parallel beam of grating principle, oblique irradiation, narrow slit scanning and intelligent algorithm. The relevant data are measured online and the error norm is used to determine whether the keyseat is qualified or not, and the rapid inspection of 0.1 micron level is realized, providing technical support for the intelligent manufacturing of components with keyseat.
Keywords: Grating principle; Closed keyseat; Symmetry detection; Parallel beam of light; Error norm
Introduction
The measurement of the symmetry of shaft keyseat is an important but difficult point in machining quality control. No matter by using the traditional way to measure on the inspection platform or by the CNC machine or three coordinate measuring machine, it takes a lot of time, especially for the large diameter of the shaft. Shanshan [1] used the Canny algorithm to extract the two-dimensional contour of the mechanical parts to be tested effectively, and the contour information was refined under the sub-pixel subdivision edge technology. Zhang et al. [2] proposed a new method for precision evaluation of sheet metal forming geometry measurement with statistics theory and combination of the characteristics of 3D optical measurement technology, gaining the accuracy of dimensional inspection. Yun et al. [3] proposed the application of intelligent inspection robot system in sutong GIL comprehensive pipe corridor project. Yong [4] employed laser tracker to achieve faster and more accurate online detection of large workpiece, focusing on how to use the laser tracker to quickly and accurately complete the measurement of shaft keyseat symmetry. Yan Wenping et al. [5] proposed a method to use specially designed process equipment to test keyseat. Su-Mei et al. [6] worked out a machine vision system based on vehicle data recorder and image signal processing to automatically evaluate rail curvature in view of the long distance of railway lines, which makes it difficult to detect track state effectively and accurately. Yong et al. [7] Proposed a detection system for LED press based on machine vision in this study. In this system, two cameras are used to detect epoxy point position and two cameras are used to detect patch status. Mittal et al. [8] described an in-depth survey of problems faced in existing computer vision applications and to present AI on the Edge along with Open VINO toolkit as the solution to those problems. Feng et al. [9] demonstrated a novel application of computer vision technology to solve a challenging vehicle WIM problem. Requiring no sensor installation on the roadway or the vehicle, this cost-effective non-contact computer vision system has demonstrated a great potential to be implemented. Tsotsos et al. [10] examined the distribution of sensor settings in vision datasets, only one potential data set bias, and performance of both classic and deep learning algorithms under various camera settings. The current study will use the grating principle to inspect the closed keyseat with efficiency and ease..
Common Inspection of the Keyseat
The detection of keyseats on the shaft is divided into geometric size detection and position detection. Keyseat geometry size detection is relatively simple, can be directly tested by the meter or gauge. The position detection refers to the offset degree of both sides of the keyseat with respect to the measurement reference, which is difficult to detect because of many complex influencing factors. The commonly used measure of symmetry uses a dial meter or digital instrument to measure the side of the key without gap with the measured keyseat (Figure 1).
Figure 1:Object to inspect: closed keyseat.

Traditional symmetry inspection

where d—— shaft diameter t1sub>——keyseat depth ΔIsub>—— deviation of one working side of standard block from the axis of the shaft ΔII—— deviation of another working side of standard block from the axis of the shaft
High Precision Inspection On-line Based on Grating Principle
Inspection datum axis—central line of the shaft
In grating field, a beam of parallel laser lights radiate perpendicularly the sensing screen (Figure 2). the shaft with a closed keyseat is laid just in the way. And then on the sensing screen the two longitudinal lines of the shaft contour are obtained. When a third line is put forward orthogonally to the two lines, two intersection points, P1 and P2, are known, and the distance between the two points will be obtained in terms of the diameter, d. In order to gain the precision value of the diameter, several pairs of the dual points may be made (Figure 3 & 4).
Figure 2:Common inspection of keyseat symmetry.

Figure 3:Common inspection of keyseat symmetry.

Figure 4:Common inspection of keyseat symmetry.

Then we have the diameter of the shaft
The location of the datum axis is ldatum
Equation (3) provides the datum for symmetry inspection.
Inspection of keyseat depth with oblique parallel light beam
Then on the oblique sensing screen, points and have been obtained, and the concrete depth of the keyseat is calculated. As a result, Equation (4) will be written in terms of

Inspection of keyseat width and length with oblique parallel light beam
Inspection of keyseat width and length is done in a similar manner (Figure 5 & 6). with the oblique angle of 45°, on v, ω and π planes, the width remain unchanged, and the point is to express and to calculate it. Here the narrow-oblique projecting method is adopted and the scanning operation is so done that the original points A, D, E, J, F, I, and other points on the v plane are projected by way of ω plane with incident and reflected parallel laser beam onto the π plane with sensor array. Then by the following calculating algorithms the keyseat width will be obtained.
Figure 5:Inspection of the closed keyseat geometry

Figure 6:Symmetry inspection.


In order to gain more accurate value of the width, at least average of five values is employed of five narrow oblique scanning operations at interval of

where Lest—— pre-estimated value of the real length of the keyseat, L
The edge boundary recognition

where qk—— grey-scale of a point along the line of the narrow
scanning
U—— grey-scale difference of any two adjacent points along
the line of the narrow scanning
Inspection of Keyseat Symmetry with Oblique Parallel Laser Beam
In the grating field with laser beam by oblique projection to the keyseat (v place ), reflected lights on the π plane with the narrow scanning, array of separate points along efficient scanning lines, the symmetry, S, is gained by the following algorithm
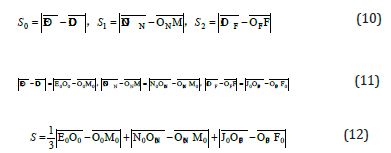
Error-Norm Algorithm for Qualification Check
The diameter of tested shaft, width, depth, length, and symmetry of the closed keyseat, with standard values respectively are dr, tr, t1r, Lr, and Sr. Now the error-norm of the geometry and symmetry are

where ω1, ω2, ω3, ω4, ω5—— tolerance of diameter of tested shaft, of width, depth, length, and symmetry of the closed keyseat, respectively, or the allowable values of them. The left side of Equa tion (13) indicates respectively the error-norms of the diameter, keyseat depth, width, length, and symmetry. All these values calculated from the above may be checked by error-norm test in terms of their tolerances.
Conclusion
Based on the analysis of the general inspection methods of closed key seat depth and symmetry, the current study introduced the parallel beam of grating principle, via oblique irradiation, narrow slit scanning, grey-scale difference to approve the edge of the closed key seat. Error-norm algorithm was applied to check the qualification of the geometry and symmetry. The so-called oblique grating field and data-processing method have created swift on-line inspection of the closed key seat with measurement of 0.1μm accuracy, providing technical support for the intelligent manufacturing of components with keyseat.
References
- Shanshan L (2020) Analysis of geometric dimension optimization detection method for mechanical parts based on image processing. South Agricultural Machinery 51(20): 175-176.
- Zhang D, Daiping B, Chao W, Liangwen W, Cheng G (2012) Research on new method for precision evaluation of sheet metal forming geometry measurement. Forging and Stamping Technology 37(06): 96-100.
- Yun T, Shuang C, Jieqing D, Yong M, Zhao K, et al. (2019) Application of intelligent inspection robot system in Sutong GIL utility tunnel project. High Voltage Engineering 45(2): 393-401.
- Yong T (2012) Application of laser tracker in measuring symmetry of shaft keyseat. Gansu Science and Technology 38(17): 5-18.
- Yan Wenping, Song Jiani, Zhou Libo (2010) Optimization design of clamping device for keyseat processing of small shaft. Mechanical Design and Manufacture 12: 267-268.
- Su-Mei W, Ching-Lung L, Yi-Qing N (2021) A machine vision system based on driving recorder for automatic inspection of rail curvature. IEEE Sensors Journal 21(10): 11291-11300.
- Yong KC, Seok JH, Jong-Su K, Myeong-Woo C (2013) LED die border inspection system using integrated machine visions. Journal of Korea Academia-Industrial Cooperation Society 14(6): 2624-2630
- Mittal V, Bhushan B (2020) Accelerated computer vision inference with AI on the edge. 2020 IEEE 9th International Conference on Communication Systems and Network Technologies (CSNT 2020), Gwalior, India, pp. 55-60.
- Feng MQ, Leung RY (2021) Application of computer vision for estimation of moving vehicle weight. IEEE Sensors Journal 21(10): 11588-11597.
- Tsotsos J, Kotseruba I, Wu YL (2019) Why does data-driven beat theory-driven computer vision? IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, South Korea, pp. 2057-2060.
© 2023 Jinling Song. This is an open access article distributed under the terms of the Creative Commons Attribution License , which permits unrestricted use, distribution, and build upon your work non-commercially.
Editor In Chief







.jpg)

























Signup for Newsletter

Quick Links
 Editorial Board Registrations
Editorial Board Registrations Submit your Article
Submit your Article Refer a Friend
Refer a Friend Advertise With Us
Advertise With UsOur Recent Edition

.jpg)



Top Editors




.jpg)

















.bmp)
.jpg)
.png)
.jpg)













.jpg)






.png)

.png)




.png)




Financial Support

Sponsors

Latest e-Books

Latest Video

 a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in
a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in