
- About Us
- Information
-

The Author ensures that the research has been conducted responsibly and ethically with adherence to all relevant regulations. read more..
- For Authors
- For Reviewer
- Manuscript Guidelines
- Membership
- Publication Ethics
-
- Journals
- Reprints
- e-Books
- Videos
- Policies
- Contact Us
 COVID-19
COVID-19
- Submissions



Full Text
COJ Technical & Scientific Research
Personalized Driving Behavior Oriented Autonomous Vehicle Control for Typical Traffic Situations
Haoran Li1,2,3*, Wangling Wei1, Sifa Zheng2,3, Chuan Sun2,4, Yunpeng Lu1 and Tuqiang Zhou5
1School of Automotive and Transportation Engineering, Wuhan University of Science and Technology, China
2Suzhou Automotive Research Institute (Xiangcheng), Tsinghua University, China
3School of Vehicle and Mobility, Tsinghua University, China
4Civil and Environmental Engineering, the Hong Kong Polytechnic University, China
5School of Transportation Engineering, East China Jiaotong University, China
*Corresponding author:Haoran Li, Wuhan University of Science and Technology, Wuhan, Hubei, China
Submission: February 08, 2023; Published: June 21, 2023

Volume4 Issue3June , 2023
Abstract
Autonomous driving systems not only provide services for human drivers, but also need to consider the personalized driving requirements of human beings. First, a Proportional Integral Differential (PID) feedback channel is introduced in a traditional Model Predictive Control (MPC) to improve the performance of the controller. Then based on the Chance Constrained Programming, the control constraint is combined with driver personalization to reflect a variety of driving personality characteristics. Finally, the proposed method is tested using Hardware-in-the-loop (HIL) experiments. The experiment results demonstrate that the proposed method can successfully implement vehicle tracking control and make the vehicle’s state of movement match the driver’s expectations, which can increase driver comfort and driving safety.
Keywords:Autonomous vehicle; MPC; Driving styles; Vehicle control; Personalized constraints
Introduction
While vehicles have made many aspects of daily life more convenient, they have also created a variety of traffic issues, including traffic congestion, accidents, and environmental pollution [1-3]. In recent years, many approaches have been proposed to solve vehicle control problems, including Model Predictive Control (MPC), Proportional Integral Differential (PID), machine learning algorithms, etc. Hrovat [4] describe how they used the MPC in hybrid vehicle motion control, energy efficiency management, and other aspects. Keen [5] conduct a field experiment to calibrate the critical parameters of the MPC steering controller based on experimental data they collected. Although nonlinear MPC have generally performed well in terms of the construction of driver models in the above research, it failed to deal with complex majority driver models and difficult parameter calibrations, making it difficult to apply in practice. Many studies have been developed about personalized control in recent years. Bolduc [6] first extract personalized driving style indicators and establish a multi-modelbased evaluation method to find the optimal driver model, including the vertical driving style and integrating the driver’s style into the control model. Zhu [7] propose a data-based Personalized Adaptive Cruise Control (PACC) system to improve users’ experiences about safe driving assistance systems. However, the above personalized control methods are mainly applied to the assistance systems and are not applicable to AVs as a whole. In summary, there are certainly errors between the output control value and the required control value due to complex nonlinear systems [8].
Feedback MPC Algorithm
Model Predictive Control (MPC) is a control method based on rolling optimization. In order to eliminate the steady-state error of the traditional MPC, this paper proposes an autonomous vehicle control method based on feedback MPC, as shown in (Figure 1)
Figure 1:Control framework diagram.

Feedback model predictive control
The feedback channels introduced in this paper use a PID controller. The design of the PID controller is shown in (1) and (2):
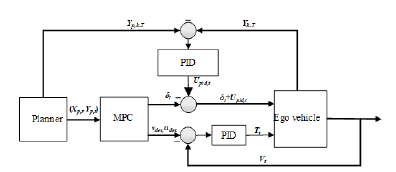
The control value of the feedback PID output modifies the output control value of the feedforward MPC controller to produce the total lateral control value, as shown in (3):

The input shown in (13) is selected to verify the differences between MPC and feedback MPC and PID control. The control results are shown in Figure 2.
Figure 2:Control results for a variable frequency sinusoidal input.

Personalized Constraints
The core idea of this method is that the constraints of optimization vary, the probability of varying is not less than a certain confidence level, and its model as such is shown in (5):
where is the objective function, and is probability, is the confidence level.
Car-following scene
In this scene, and the personalized constraint of the MPC is shown in (6):
Then we get (7):
where and represent the probability distribution of the
headway time and the longitudinal acceleration limit value of a
driver in the car-following scene, respectively.
Lane-changing scene
In the lane-changing scene, the personalized constraint of the control is shown in (8):

The constraints under the lane-changing scene are shown in the following equation:

where represents the probability distribution of the limit value of the yaw acceleration of a certain driver in the lane-changing scene. According to the analysis of naturalistic driving data, it is possible to obtain the normal distribution law of the personalized acceleration, headway, and yaw acceleration limit values under a driver’s car-following scene.
Experimental Simulation Verification
A hardware-in-the-loop test platform was established based on the decision-making, planning and control structure of the personalized autonomous driving system to test the autonomous driving algorithm reflecting human driving behavior.
HIL verification result analysis
During the HIL simulation process, the control value of the vehicle under various test conditions and the corresponding vehicle dynamics state are recorded and analyzed.
Figure 3:Simulation scene for feedback MPC.

Feedback MPC test results: The HIL simulation verification scene of the feedback MPC is shown in Figure 3. The red vehicle is the EV (ego vehicle), and the green vehicle are the SV (surrounding vehicles). The simulation planner adopts the artificial potential field algorithm, and the controller uses a feedback MPC method.
The simulation experiment results of the MPC controller with PID feedback are shown in Figure 4.
Figure 4:Simulation results of the feedback MPC in double lane change.

Personalized constraint test results: The simulation results of free straight driving in the test scene are shown in Figure 5. From the HIL experiments in the scenes above, it can be seen that the controller designed in this paper can better complete the task of lane-changing, and maintaining safety and stability.
Figure 5:Simulation results of the feedback MPC in double lane change.

Conclusion
The main research work and related conclusions of this paper
are as follows:
a) In this paper, an improved MPC algorithm is proposed, and the
PID feedback channel is introduced into the traditional model
predictive control algorithm to improve the dynamic and
steady-state performance of the traditional MPC algorithm.
b) Based on Chance Constrained Programming, the operability of
different drivers is introduced into the MPC control algorithm
in the form of constraints. This enables the results of the
control to reflect individual characteristics.
Acknowledgement
This work was supported in part by the National Natural Science Foundation of China under Grant (52202413 and 52002215. Natural Science Foundation of Jiangsu Province (BK20220243). the Hubei Science and Technology Project (2021BEC005, 2021BLB225, 2020BGC026). the Research Project of Hubei Provincial Department of Education (D20212901); and the Hong Kong Scholars Program (XJ2021028).
References
- Rios Torres, Malikopoulos AA (2018) Impact of partial penetrations of connected and automated vehicles on fuel consumption and traffic flow. IEEE Transactions on Intelligent Vehicles 3: 453-462.
- Vahidi A, Sciarretta A (2018) Energy saving potentials of connected and automated vehicles. Transportation Research Part C: Emerging Technologies 95: 822-843.
- Li L, Huang WL, Liu YH, Zheng MN, Wang FY (2016) Intelligence testing for autonomous vehicles: A new approach. IEEE Transactions Intelligent Vehicles 1: 158-166.
- Hrovat D, Dicairano S, Tseng HE, Kolmanovsky IV (2012) The development of model predictive control in automotive industry: a survey. IEEE 1: 295-302.
- Keen SD, Cole DJ (2012) Bias-free identification of a linear model-predictive steering controller from measured driver steering behavior. IEEE Trans Syst Man Cybern B Cybern 42(2): 434-443.
- Bolduc AP, Guo L, Jia Y (2019) Multimodel approach to personalized autonomous adaptive cruise control. IEEE Transactions Intelligent Vehicles 4: 321-330.
- Bing Z, Yuande J, Jian Z, Rui H, Ning B, et al. (2019) Typical-driving-style-oriented personalized adaptive cruise control design based on human driving data. Transportation Research Part C: Emerging Technologies 100: 274-288.
- Macadam CC (2001) Development of a driver model for near/at limit vehicle handling. US.
© 2023 Haoran Li. This is an open access article distributed under the terms of the Creative Commons Attribution License , which permits unrestricted use, distribution, and build upon your work non-commercially.
Editor In Chief







.jpg)

























Signup for Newsletter

Quick Links
 Editorial Board Registrations
Editorial Board Registrations Submit your Article
Submit your Article Refer a Friend
Refer a Friend Advertise With Us
Advertise With UsOur Recent Edition

.jpg)



Top Editors




.jpg)

















.bmp)
.jpg)
.png)
.jpg)













.jpg)






.png)

.png)




.png)




Financial Support

Sponsors

Latest e-Books

Latest Video

 a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in
a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in