
- About Us
- Information
-

The Author ensures that the research has been conducted responsibly and ethically with adherence to all relevant regulations. read more..
- For Authors
- For Reviewer
- Manuscript Guidelines
- Membership
- Publication Ethics
-
- Journals
- Reprints
- e-Books
- Videos
- Policies
- Contact Us
 COVID-19
COVID-19
- Submissions



Full Text
COJ Reviews & Research
Mechanics Analysis and Design of Double Fulcrum Gripper with Accurate Control by Difference Norm and Large Diameter - Lead Ratio Screw
Gu Lizhi1,2, Xia Juming1, Liang Fengshun3, Hu Wentao1, Guo Hongjie1, Huang Yuyao1 and Song Jinling4*
1Key Laboratory of Virtual Manufacturing Technology, China
2College of Mechanical Engineering and Automation, China
3Fujian (Quanzhou) Harbin Institute of Technology, China
4Quanzhou Normal University, China
*Corresponding author: Song Jinling, Quanzhou Normal University, Quanzhou, Fujian Province, China
Submission: January 01, 2022; Published: March 01, 2022
ISSN 2639-0590Volum3 Issue5
Abstract
End-effector plays a decisive role in the practical use of robot. In the two-color sole molding production line, operating robot is used to replace the traditional manual operation. This paper designed a double fulcrum gripper, which is mainly composed of double gripper, double fulcrum hinge, double large diameter - lead ratio screw, taper plate, reset spring motor, etc. The correct position between the gripper clipper and the handle is precisely controlled by the pressure difference norm of the gripper clipper and the large diameter-lead ratio screw mechanism. The embedded large diameter-lead ratio screw mechanism is used to accurately displace the taper plate, and then the lever is rotated to achieve the reliable clamping of the handle to complete the operation function. The clipper working surface is optimized and universal, which can not only operate the mold, but also effectively grip objects within a certain weight range.
Keywords: Double fulcrum gripper; Difference norm; Double large diameter-lead ratio screw; Load set; B-spline surface
Introduction
The robot end-effector needs to effectively grip objects to provide technical support for handling, warehousing, or other operations. Generally, the gripper exerts positive clamping pressure on the object to obtain a certain friction force so that the object does not fall off or obtains reliable clamping force through the test. If the positive pressure provided is too small, it is difficult to hold an object effectively and reliably. If the positive pressure is too large, it may cause excessive deformation or even damage of the clamping part of the object, and also cause waste of energy. Such grippers lack versatility. The mechanical gripper has the advantages of simple structure, reliability and good versatility. It can be subdivided into translation type and return transformation type. In the rotary gripper has a single fulcrum and double fulcrum points, clamp type and support type; There are electric, hydraulic and pneumatic driving mode. In the current study, a universal flexible gripper with double fulcrum is proposed and designed, which can ensure effective gripper in a certain weight range. Due to the optimized calculation of applied force, the gripper is reliable and saves energy. At the same time, the gripper can meet the requirements of multi-color sole molding robot to operate the mold [1-3].
Principles and Methods
Weight range of objects to clamp
Let the clamping weight of moving object be

where 0 W ——the average weight of the object expected to be clamped can also be regarded as the weight of the object most frequently needed to be clamped.
ΔW ——The expected weight variation range of the clamped object.
Clamping force (positive pressure) application and calculation
According to Coulomb’s law of friction, the static friction force is proportional to the positive pressure N applied to the object, and is proportional to the friction coefficient μ

If only the weightiest of the object is considered, the friction provided when the maximum dead weight of the object is taken should be at least

Design and calculation of actual force application
When the gripper holds the object, the usual state is static. Once the stationary state changes to motion, there is an acceleration, which affects the holding state of the object -- when the gripper rises, it becomes “overweight”; A “centrifugal force” occurs when the gripper rotates. When the clamping object rotates, the centrifugal force is

where M—— weight of the object
Sufficient friction should be provided to balance with the sum of and gravity and supergravity Wb:

Accordingly, the load set that provides sufficient friction force is:

Application Examples and Analysis of Mechanics Properties
In the production line of multi-color shoe molding robot, it is necessary to operate the mold reliably to completely replace manual operation (Figure 1). The handle of the mold is a cylindrical steel piece connected with the mold piece. After being clamped by this study, the manipulator arm is connected and separated dynamically smoothly with the operating lever of the mold [4]. Double fulcrum gripper applied to the mold turning torque to ensure effective mold turning, the process is stable, few impact, good effect (Figure 2).
Figure 1: Simulation of working process.

Figure 2: Mechanics model of gripper clipper.

Mechanics model and force analysis of gripper
In essence, one of the clippers of a double fulcrum gripper is a lever, as shown in figure. At this stage when the end-effector is approaching the target, the clipper is basically in A free state of release, and the clipper has not yet contacted the operating handle. The balance is only achieved between the hinge fulcrum and the operating point of the compression spring, and the contact point A between the cone plate and the clipper.
In the collision transition stage, the gripper is in the second position, and the guide surface of the gripper is in contact with the operating handle and there is relative sliding, thus forming a relatively complex force balance. The analysis is as follows. The balance of the force system is:

Thus, the R1 F in the collision transition stage can be obtained.
Similarly, in the grasping and actual operating stage, the gripper is in the third position, and the instantaneous force state of the gripper holding the handle can be obtained:
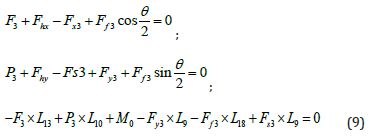
So that R3 F and 3 P in grasping stage were obtained.
The above analysis of the force on the gripper is based on the grasping force ( y F ). If subdivided by x F or analyzed according to the resultant force R F , the force state trend of the gripper is the same (Figure 3) and (Figure 4).
Figure 3: State curves of colliding and clamping force.

Figure 4: Difference norm method.

Position judgment and adjustment of gripper based on difference norm method
In order to hold the handle accurately, the difference norm method is used to judge and adjust the relative position of the clipper and the handle. In ideal condition, the position of sensor 0 on the clipper should coincide with the position of the operating handle h0 O , and the clamping force is equal to the set value; the positions of sensor 1 and sensor 2 are both distributed on both sides, and the forces on them are small and equal. On this basis, we have

where,
Take 0 ε with a small positive number, and also take ε1 =ε2 as also a small positive number, then the pressure values of the three sensors on the gripper clipper can be accurately adjusted by the large-diameter-leader-ratio screw mechanism, so that the gripper can grasp the handle better [5,6]. When the gripper has not reached the ideal position, the operating handle located on the left side of the center of the gripper, that is, Oh1 is on the left side of Oh0. At this time
When the screw mechanism runs forward accurately, the taper plate continues to move slightly left, then it will appear
At this optimal position the gripper is fixed, and Oh2 si at the right of Oh0.
Conclusion
The double fulcrum gripper designed in this paper is mainly composed of gripper clipper, fulcrum, cone plate, reset spring, moving nut, large ratio of diameter to lead screw, bearing, coupling and motor. It is a universal double fulcrum flexible gripper with optimized design, which can ensure effective gripper within a certain weight range of the object. Due to the optimized calculation of the applied force, the gripper is reliable and saves energy.
This double fulcrum gripper is flexible. Using planning and optimal design, it can hold objects of different weights within a certain range; Under the same set of grippers, according to the different task and content, the combination of gripper - vertical movement - rotation - operation can be safely and reliably realized. A number of pressure sensors are set up in the area that is in contact with the object and mainly grasps the object. In addition, the clamping clipper working surface is designed as a combination of B-spline surface + cylindrical surface + B-spline surface, which makes the object grasps reliably and is easy to manufacture. The gripper clamping working surface is coated with high-strength wear-resisting plastic, and the lever working cylinder surface is quenched, which not only ensures the wear resistance, but also meets the need of keeping contact with the cone plate when the gripper is rotating around the fulcrum, thus forming a good and durable double fulcrum gripper. By using the difference norm algorithm and taking δ as a positive number less than 1, the friction force of gripper can be precisely controlled by comparing the ideal value calculated according to the optimal design with the actual value and adjusting it in real time. The design and adoption of a large ratio of diameter to lead screw mechanism provide a reliable guarantee for the micro displacement of the cone plate and the accurate adjustment of the clamping force imposed on the gripper.
Acknowledgement
This research is sponsored by the opening project of Science and Technology Department of Fujian, JZK2017001, also by Xnzz1801and Xnzz1803 of Key Laboratory of Virtual Manufacturing Technology of Fujian Universities, 2020C013,2020C051, Quanzhou Science and Technology projects, as well as by the construction project of Quanzhou’s Master Studio of the Speciality of Mechanical Design, Manufacture Engineering, and Automation.
References
- Martinez P, Al-Hussein M, Rafiq A (2020) Intelligent vision-based online inspection system of screw-fastening operations in light-gauge steel frame manufacturing. International Journal of Advanced Manufacturing Technology 109(3-4): 645-657.
- Chongfeng C, Pan L (2020) Optimization design of manipulator gripper. Mechanical Manufacturing 58(10): 15-16.
- Hongwei Q (2021) Structural system design of manipulator. Scientific and Technological Innovation 22: 54-55.
- Ozan K, Taglioglu GB, Ertugrul S (2021) The series elastic gripper design, object detection and recognition by touch. Journal of Mechanisms and Robotics 14(1): 1-33.
- Zhigang H, Zhang Y, Hu Bin, Baosheng F, Congwang X, et al. (2021) Design of flexible gripper for cooperative robot. Modern Manufacture Engineering (05).
- Xinmao L, Manlu L, Jisheng W, Qijie Z (2021) Research on adaptive valve turning method of manipulator based on deep reinforcement learning. Engineering Science and Technology II. The Information Technology-Manufacturing Automation 43(07): 47-52.
© 2022 Song Jinling. This is an open access article distributed under the terms of the Creative Commons Attribution License , which permits unrestricted use, distribution, and build upon your work non-commercially.
Editor In Chief







.jpg)

























Signup for Newsletter

Quick Links
 Editorial Board Registrations
Editorial Board Registrations Submit your Article
Submit your Article Refer a Friend
Refer a Friend Advertise With Us
Advertise With UsOur Recent Edition

.jpg)



Top Editors




.jpg)

















.bmp)
.jpg)
.png)
.jpg)













.jpg)






.png)

.png)




.png)




Financial Support

Sponsors

Latest e-Books

Latest Video

 a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in
a Creative Commons Attribution 4.0 International License. Based on a work at www.crimsonpublishers.com.
Best viewed in